In a review article published in the journal Biomimetics, researchers extensively explored the recent advancements and future directions in the research of embodied intelligence within the realm of soft robotics. Their investigation covered various areas such as morphological computation, artificial evolution, perception, control, and decision-making.
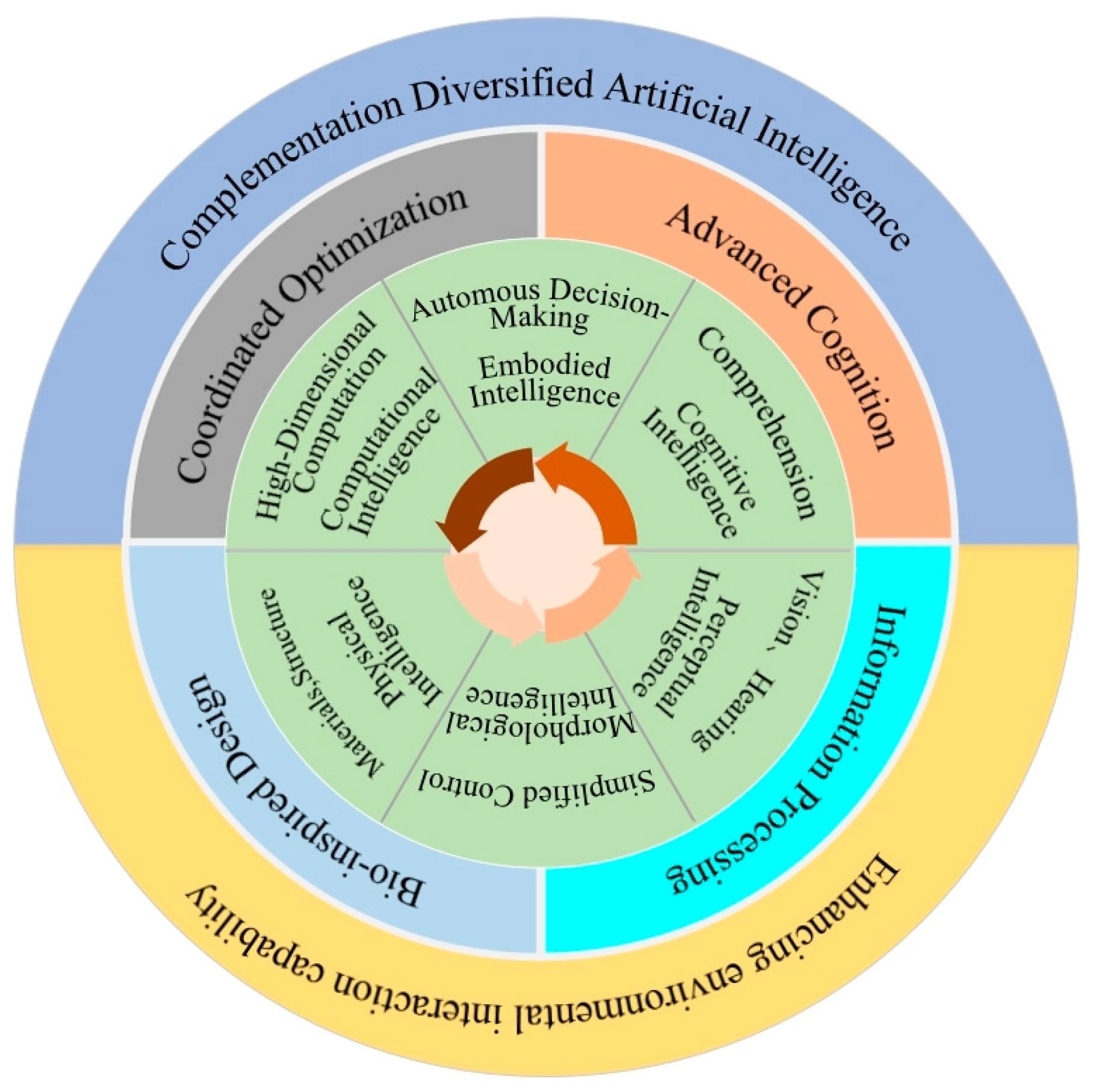 Multilayered and interactive map of diverse intelligence systems. Image Credit: https://www.mdpi.com/2313-7673/9/4/248
Multilayered and interactive map of diverse intelligence systems. Image Credit: https://www.mdpi.com/2313-7673/9/4/248
Background
Artificial intelligence (AI) encompasses various types of intelligence, including cognitive, physical, perceptual, computational, and embodied intelligence. Embodied intelligence, a primary goal within AI, aims to understand and replicate the natural intelligence mechanisms of biological organisms interacting with their surroundings through physical structure/form. Morphological intelligence, closely linked to embodied intelligence, suggests that an agent's morphology and material properties significantly influence its information processing, learning, and adaptability.
Soft robotics, inspired by nature, crafts robots that are soft, compliant, and deformable, mirroring the characteristics and behaviors of biological organisms. These robots offer advantages over traditional rigid robots, including flexibility, safety, resilience, and efficiency. Moreover, they provide an ideal platform for studying embodied intelligence, as they enable exploration of how physical form and the environment affect perception, control, and decision-making.
About the Research
In this review, the authors conducted a comprehensive review of current research on embodied intelligence within soft robotics, focusing on three primary areas: embodied morphological computation, embodied artificial evolution, and soft robotics in perception, control, and decision-making. Each aspect was analyzed and summarized, covering key findings, challenges, opportunities, and relevant references.
Embodied morphological computation leverages the physical dynamics of soft robots for information processing, learning, and control without relying on complex algorithms or external controllers. The study examined various methodologies and applications, including reservoir computing, feedback mechanisms, body dynamics, and environmental perception.
According to the authors, embodied artificial evolution simulates and explores the co-evolution and interaction of soft robot morphology and control through evolutionary algorithms and reinforcement learning (RL). Diverse approaches and instances of artificial evolution in soft robotics were reviewed, such as genetic reinforcement learning, developmental robotics, modular robotics, and multi-robot organisms.
Soft robotics in perception, control, and decision-making aims to augment capabilities and autonomy in navigating complex and dynamic environments. The authors presented various techniques and challenges within this realm, including multimodal sensing, model-free control, reinforcement learning, neural networks, and multi-sensor data fusion.
Synergies in Soft Robotics
The authors underscored several outcomes and contributions of soft robotics, highlighting common themes and insights across embodied intelligence, morphological computation, and autonomous control:
- Mutual Benefit of Soft Robotics and Embodied Intelligence: Soft robotics and embodied intelligence are mutually beneficial and complementary domains. Soft robotics provides a novel way for realizing embodied intelligence, while embodied intelligence offers fresh perspectives for designing and controlling soft robots.
- Integration of Soft Robotics and Morphological Computation: The fusion of soft robotics with morphological computation holds promise for creating more adaptive and intelligent robotic systems. By harnessing the physical properties and dynamics of soft robots, this integration facilitates information processing, learning, and control without the need for complex algorithms or external controllers.
- Co-evolution of Morphology and Control: Soft robotics can benefit from the co-evolution of morphology and control, enabling robots to optimize physical form and behavior for specific tasks and environments. Through evolutionary algorithms and reinforcement learning, this approach searches for optimal design and strategy for soft robots simultaneously.
- Deep Integration of Perception, Control, and Decision Making: Deeply integrating perception, control, and decision-making in soft robotics enhances autonomy and performance in dynamic environments. By employing various sensors, actuators, and neural networks, robots sense, act, and learn from interactions with the environment, enhancing adaptability and performance.
Applications
The review discussed promising applications across various domains, including reconnaissance, detection, rescue, medical, and biomedical fields. These applications demand robots with adaptive capabilities to navigate complex and dynamic environments, autonomously make decisions, and alter shape as needed. Some of the potential applications include:
- Deep-Sea Exploration: Soft robots mimic natural organisms to explore inaccessible or hazardous deep-sea environments.
- Advanced Sensing and Actuation: Soft robots integrate innovative sensors and actuators for flexible and multimodal interaction with the environment.
- Minimally Invasive Medical Procedures: Soft robots deliver cellular cargo to specific targets in the body, enabling precise and minimally invasive surgery and diagnosis.
- Self-Organizing Multi-Robot Systems: Soft robots self-organize, self-repair, and form artificial multi-robot organisms for dynamic tasks such as aggregation, disassembly, and resource sharing.
Conclusion
In summary, the researchers explored the potential of embodied intelligence in soft robotics for advancing artificial intelligence and robotics. They acknowledged limitations and challenges and proposed the following directions:
- Developing Systematic Design Methods: Developing systematic design methods and evaluation metrics for morphological computation and artificial evolution, integrating them with other disciplines for better design solutions.
- Addressing Modeling Challenges: Addressing modeling and solving difficulties of soft robots with complex morphologies, developing more efficient control algorithms and strategies.
- Enhancing Sensory Capabilities: Improving sensory capabilities and data processing methods for more accurate environmental perception and localization.
- Improving Simulation and Validation Techniques: Enhancing simulation and experimental validation techniques, applying them to realistic scenarios for thorough evaluation.
Journal Reference
Zhao, Z.; Wu, Q.; Wang, J.; Zhang, B.; Zhong, C.; Zhilenkov, A.A. Exploring Embodied Intelligence in Soft Robotics: A Review. Biomimetics 2024, 9, 248. https://doi.org/10.3390/biomimetics9040248, https://www.mdpi.com/2313-7673/9/4/248.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.